Clasificación de modelos de realidad
Los modelos de realidad se han utilizado sobre todo para proporcionar contexto a sus colegas ingenieros. Los adelantos en la producción de los modelos de realidad han mejorado en gran medida la fidelidad de dichos modelos, pero su valor ha sido algo limitado tratando los modelos como monolitos. Con las herramientas Acute3D de ContextCapture, es posible crear una malla de realidad que represente con gran exactitud toda una ciudad entera, planta o cualquier otro gran proyecto de infraestructura. Sin embargo, las ciudades se componen de muchas parcelas, y las plantas consisten en muchos componentes. El modelo de realidad puede capturar cada una de las parcelas o de los componentes con exactitud, pero sin un método para distinguir la parcela o los componentes del resto del modelo de realidad o unirlos a sus datos de ingeniería o GIS subyacentes, el valor del modelo es limitado.
MicroStation introduce el concepto de usar objetos de ingeniería o GIS para clasificar espacialmente un modelo de realidad en un conjunto discreto de volúmenes que representen esos objetos.
Clasificación GIS
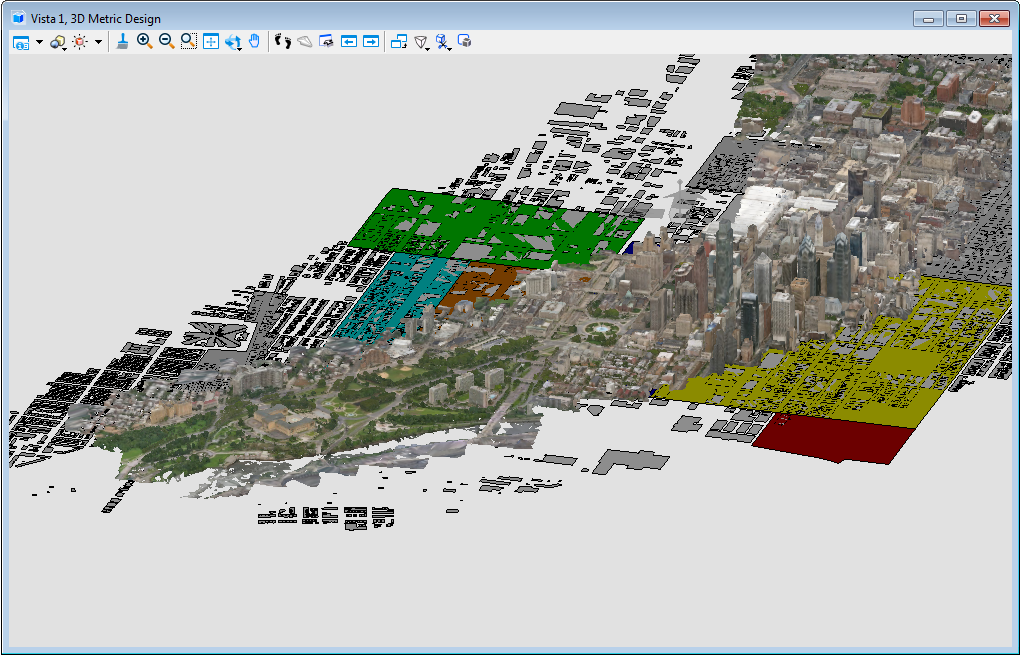
Al usar la huella de memoria del edificio para clasificar espacialmente el modelo de realidad, puede acceder al modelo de realidad como edificios discretos con datos GIS en vez de una malla monolítica y sin datos.
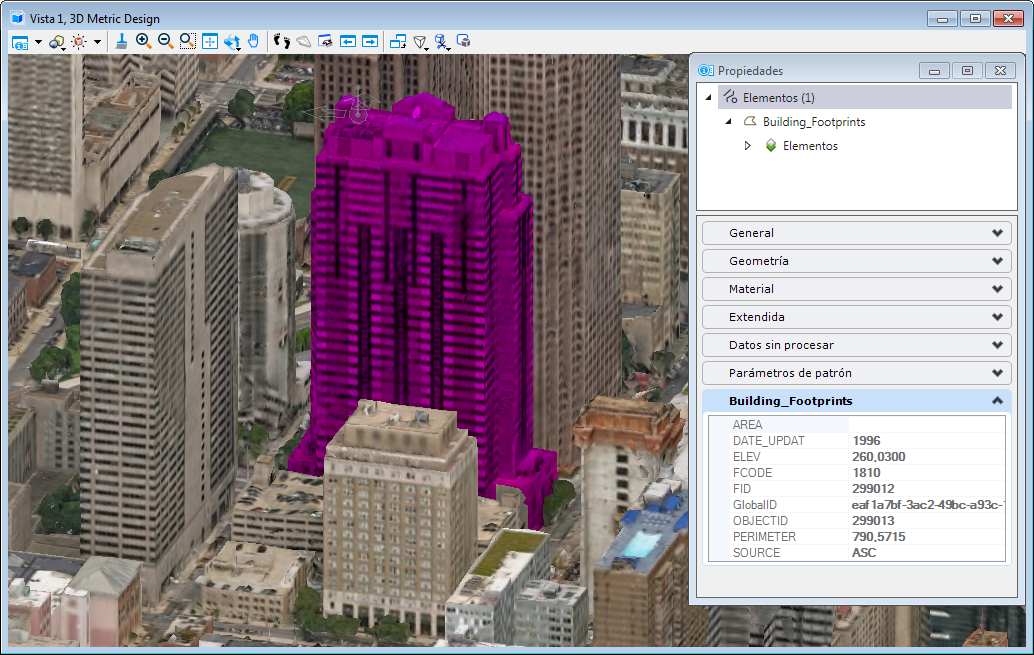
El vínculo entre los datos GIS y el modelo de realidad clasificado es bidireccional. Es posible acceder a los datos subyacentes seleccionando la malla de realidad clasificada o acceder a las clasificaciones de la malla de realidad seleccionando los datos GIS.

Compatibilidad con la malla de realidad
MicroStation CONNECT Edition se refería a las "mallas de realidad" como "mallas Acute3D", y se podía acceder a las herramientas para manipular las mallas de realidad principalmente mediante entradas de teclado. En la actualización 2 de MicroStation CONNECT Edition, se proporciona una interfaz de usuario completa para vincular y manipular mallas de realidad. Además, se ha añadido la compatibilidad para clasificar espacialmente mallas de realidad para poder clasificar mallas de realidad y asociarlas con datos de diseño o GIS.